



Swarm of Simple Robots Does Surprisingly Complex Things
3. 8. 2015 | Harvard University | www.eecs.harvard.edu
In nature, vast groups of individual elements can cooperate and assemble to create highly complex global behavior through local interactions - from multicellular organisms to complex animal structures such as army ants bivouacs and flocks of birds.
In the field of robotics, researchers use inspiration from collective intelligence in nature to create artificial systems with capabilities observed in natural swarms. Researchers have designed tiny robots, inspired by ants, bees, and cells, envisioned to work together in large swarms or as programmable materials.
Nevertheless, there still exists a substantial gap between the conceptual designs and the realized systems. Creating engineered systems with similar abilities poses challenges in the design of both algorithms and physical systems that can operate at such scales. There is a vast body of work on algorithms meant to control collectives of hundreds or even thousands of robots, however, for reasons of cost, time, or complexity, they are validated in simulation only, or on a group of a few 10s of robots.
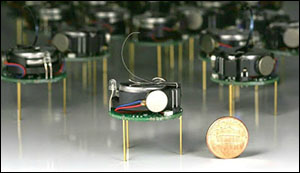
The Kilobot swarm is a thousand-robot swarm designed to allow one to program and experiment with collective behaviors in large-scale autonomous swarms. Each robot has the basic capabilities required for an autonomous swarm robot (programmable controller, basic locomotion, and local communication), but is made with low-cost parts and is mostly assembled by an automated process. In addition, the system design allows a single user to easily and scalably operate a large Kilobot collective, such as "hands-off" programming, powering on, and charging all robots. Researchers goal is to make experimental research on collective behaviors possible, and widely accessible and to enable deeper understanding and new algorithmic insights into robustness, scalability, self-organization, and emergence in collectives of limited individuals.
Read more at Harvard University
Image Credit: Harvard University
-jk-