



Origami Robot Folds Itself Up, Does Cool Stuff, Dissolves Into Nothing
5. 6. 2015 | IEEE Spectrum | spectrum.ieee.org
At ICRA 2015 in Seattle yesterday, researchers from MIT demonstrated an untethered miniature origami robot that self-folds, walks, swims, and degrades.
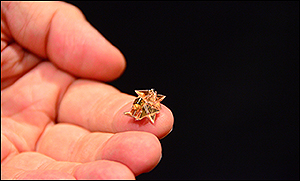
This is the first time that a robot has been able to demonstrate a complete life cycle like this, and eventually, it’ll be doing it inside your body. The unfolded robot, which is made of a magnet and PVC sandwiched between laser-cut structural layers (polystyrene or paper), weighs just 0.31 g and measures 1.7 cm on a side. Once placed on a heating element, the PVC contracts, and where the structural layers have been cut, it creates folds. In under a minute, the robot is finished, and is ready to go, zipping around at speeds of between 3 and 4 cm/s.
The motor comes in two parts: a cubic neodymium permanent magnet that the robot folds itself around, and then a set of four electromagnetic coils underneath the surface that the robot operates on to provide the magnetic fields that drive it. Tthe magnetic field isn’t dragging the magnet anywhere: the field is directional, but it’s just turning on and off at about 15 Hz. This causes the magnet that the robot is attached to oscillate back and forth, and the robot oscillates as well. As this happens, the front and back legs of the robot alternately contact the ground, and the asymmetry of the design combined with the intentionally off-center balance point causes the robot to walk forward. None of this works with the robot in its unfolded.
The advantages of using a folded robot instead of just a magnet include the ability to float, as well as the ability to more efficiently perform tasks like moving objects or digging. Once you’re done messing around, you can drive the robot into a tank of acetone and it will entirely dissolve (except for the magnet). It’s also possible to make the structural layer of the robot out of a material that dissolves in water. Also possible in the near future will be integrating self-folding sensors into the body of the robot, which could lead to autonomous operation, and eventually, doing all of this inside your body.
Read more at IEEE Spectrum
Image credit: Evan Ackerman, IEEE Spectrum
-jk-