



Cockroach inspires robot that squeezes through cracks
9. 2. 2016 | UC Berkeley | news.berkeley.edu
Not only that cockroaches can squish themselves to get into one-tenth-of-an-inch crevices, but once inside they can run at high speed even when flattened in half.
What the researchers at UC Berkeley in their research found has inspired a robot that can rapidly squeeze through cracks — a new capability for search-and-rescue in rubble resulting from tornados, earthquakes and explosions.
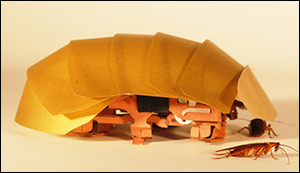
Roaches traversing crevices, study leader Kaushik Jayaram found, can withstand forces 900 times their body weight without injury. Using the roach technique as inspiration, Jayaram designed a simple and cheap palm-sized robot that can splay its legs outward when squashed, then capped it with a plastic shield similar to the tough, smooth wings covering the back of a cockroach. Called CRAM, for compressible robot with articulated mechanisms, it was able to squeeze into and run through crevices half its height.
Jayaram built the model robot using an origami-like manufacturing technique, now available as an inexpensive kit made by Dash Robotics — a commercial spin-off from previous robotic work at UC Berkeley. Now, more robust versions will be needed for real-world testing.
Read more at UC Berkeley
Image Credit: UC Berkeley
-jk-