Autonomní jízda silničních vozidel
14. 6. 2019 | Ing. Aleš Cerman, Ph.D. | ŠKODA-Auto, a. s. | www.skoda-auto.cz
Autonomní jízda vozidel je fenomén, který již opustil sféru teoretických úvah a diskusních fór a stává se stále rozšířenější realitou. Autonomní neboli samořízené vozidlo je motorové vozidlo vybavené počítačovým systémem s množstvím snímačů jako radar, lidar, GPS a kamerové systémy, kterými v reálném čase získává informace o svém okolí. Další informace vozidlo získává z přesných map a z datové komunikace se svým okolím. Tato data vozidlu umožňují orientovat se na silnici, mít přehled o okolí a určit trasu a parametry pohybu. Výsledkem je, že takové vozidlo ke svému provozu nepotřebuje řidiče.
Stupně autonomie vozidla
Většina lidí se domnívá, že samořídicí auto znamená, že vůz řídí sám za všech okolností. Pravda je trochu složitější. Asociace SAE International*) definuje šest stupňů autonomie vozidla (obr. 1).
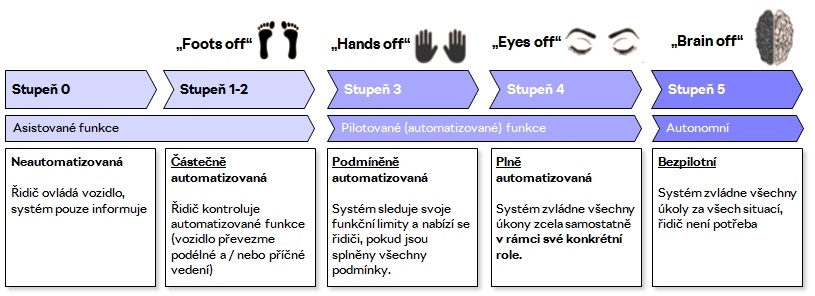 Obr. 1. Jednotlivé stupně autonomie vozidla a jejich charakteristiky
Obr. 1. Jednotlivé stupně autonomie vozidla a jejich charakteristiky
Stupeň 0 znamená, že vozidlo není vybaveno žádnými automatizovanými systémy.
Stupně 1 a 2 zahrnují částečně automatizované funkce korigované řidičem. Typickým příkladem je adaptivní tempomat, kdy systém na základě informací z předního radaru ovládá podélný pohyb (rychlost) vozidla, zatímco řidič ovládá směr.
Systémy stupně 2 jsou podporované současnou legislativou, která obsahuje homologační předpisy a zákonné rámce provozu na pozemních komunikacích.
Systémy stupně 3, tzv. podmíněně automatizované, umožňují vozidlu autonomní jízdu za určitých podmínek, lépe řečeno určité specifické jízdní scénáře. Jako příklad lze uvést funkce Highway pilot (autonomní jízda na dálnici) nebo Traffic jam pilot (autonomní jízda v dopravní zácpě). Stupeň 3 ovšem určuje i chování řidiče. Počítá se zde s tím, že přestože by systém měl být schopen zvládnout veškeré podmínky daného scénáře, mohou se vyskytnout okrajové podmínky, které systém nezvládne a vyzve řidiče k okamžitému převzetí řízení. Je zde proto dáno pravidlo, že řidič sice neřídí, musí ale alespoň částečně dohlížet na systém a musí být, v případě problémů, schopen do 10 s převzít řízení. Vozidlo s funkcemi stupně 3 proto má stále standardní ovládací prvky (volant, pedály atd.).
Stupeň 4 již znamená systém řízení plně automatizovaný, nicméně i zde zůstává možnost vozidlo řídit ručně. Jde zejména o případy, kdy se vozidlo dostane do míst, kde nemá dostatečný přísun dat. Stupeň 5 je systém koncipovaný již jako bezpilotní; vozidlo je schopno bezpečně zvládnout jakoukoliv dopravní situaci a neumožňuje řídit ručně.
Evoluce, nebo revoluce?
Nyní je zde otázka: evoluce postupně přes všechny stupně, nebo revoluční skok na stupeň 5? Na obě otázky je kladná odpověď. Tradiční výrobci vozidel se zaměřují na postupné zavádění vyšších stupňů automatizace, zatímco např. firmy zabývající se poskytováním přepravních služeb se soustředí na stupeň 5. Důvod je cenový a také estetický. Na obr. 2 je uveden příklad prototypového vozidla firmy Uber osazeného soustavou senzorů pro stupeň 5. Stříbrný „hrnec“ na střeše vozidla je rotační laserový skener Velodine, jehož cena se pohybuje okolo 70 000 amerických dolarů. Pod ním je systém kamer, na vozidle se nalézají další laserové senzory (jeden je vidět v předním nárazníku, další vedle zadního světlometu) a také několik radarů. K tomu je třeba připočítat cenu počítače vyhodnocujícího obrovské množství dat v reálném čase. Výsledná cena této sady daleko přesáhne 100 000 dolarů. Proto se tradiční výrobci zaměřují na postupný vývoj, cenovou optimalizaci a zástavbu senzoriky tak, aby příliš nekazila vzhled vozidla. Naproti tomu poskytovatelům přepravních služeb nezáleží na ceně systému. Robotické taxi fungující bez řidiče v režimu 24/7 dříve či později vydělá i na drahou soupravu senzorů. A zákazníkovi taxi je také jedno, jak takové vozidlo vypadá.

Obr. 2. Prototypové vozidlo taxislužby se sadou senzorů podporující stupeň 5
Co je třeba pro autonomní jízdu
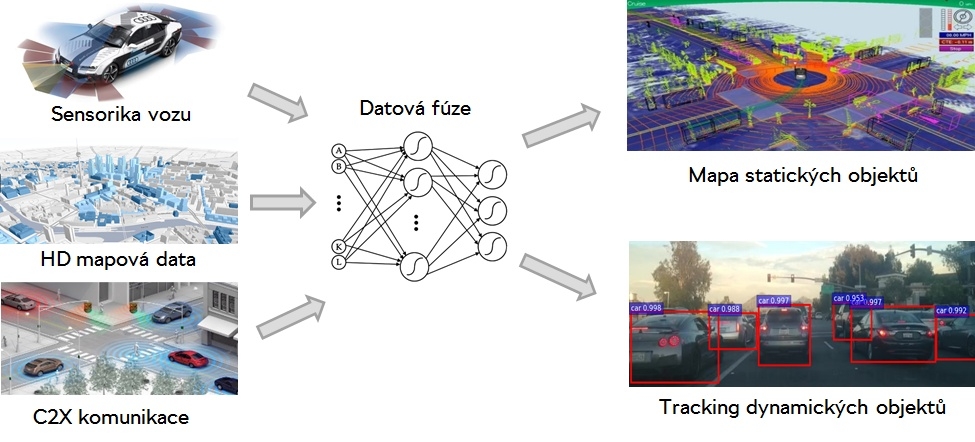
Na obr. 3 jsou základní stavební kameny systému automatické jízdy. Stroj (vozidlo) je vybaven soupravou senzorů umožňující získávat informace v okruhu celých 360° okolo vozidla. Dále jsou nutné mapové podklady ve vysokém rozlišení společně s co nejpřesnějším určením polohy vozidla. Takovéto mapy v ideálním případě poskytují 3D data infrastruktury zaměřené s přesností na centimetry. Vytvoření těchto map pomocí laserového skenování není nic složitého, ovšem velkým tématem je jejich údržba a aktualizace. Posledním stavebním kamenem je komunikace vozidla s okolím. Všechna tato data musejí být zpracovávána v reálném čase. Počítač navíc z důvodu bezpečnosti musí zajišťovat dvě nezávislé výpočetní cesty. V současnosti nejvýkonnější řešení zaručuje nVIDIA AGX s kombinovaným výkonem až 320 TOPS (tera operací za sekundu) a podporuje výpočtový model na bázi hlubokých neuronových sítí (deep neural network). Výsledkem fúze a vyhodnocení informací je neustále obnovovaná mapa statických objektů v okolí vozidla a mapa dynamických objektů, které jsou v reálném čase trekovány, tzn. je sledována jejich trajektorie a vzájemná rychlost vztažená k danému vozidlu. Na základě těchto informací je průběžně vypočítávána trajektorie tohoto vozidla.
Obr. 3. Princip a stavební kameny autonomní jízdy ve vozidle
Na obr. 4 je typická soustava senzorů pro stupeň 3 autonomní jízdy. Kromě již používaných senzorů (ultrazvukové, radarové, přední kamera, parkovací kamery) je soustava doplněna laserovými skenery a dalšími kamerami. Důvodem redundance je posílení přesnosti a spolehlivosti za využití jiných fyzikálních principů. Například přední kamera je v současných vozidlech monofokální se zorným úhlem mezi 50° až 100°. Pro autonomní jízdu je třeba vidět jednak daleko před vozidlo (úzký pohledový úhel), jednak do šířky pro sledování bočních silnic (úhel blížící se 180°). Proto se počítá se zavedením kamer vybavených několikafokální optikou. Příkladem může být vůz Tesla 3 a jeho trifokální přední kamera. Na obr. 4 je také patrný automobilový laserový skener firmy Valeo (ScaLa), jenž byl z velké části vyvíjen v Čechách.
V případě stupně automatizace 3 musí být řidič schopen do 10 s převzít řízení, a proto nesmí usnout. Je tedy samozřejmostí i sledování a kontrola řidiče pomocí kamery a systému vyhodnocujícího jeho chování.
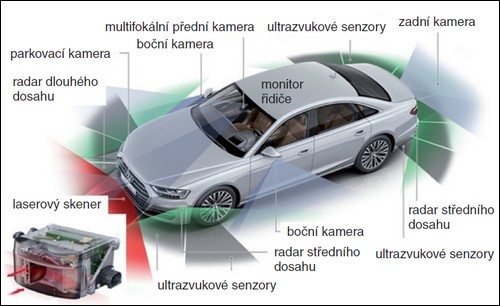
Obr. 4. Soustava senzorů pro automatickou jízdu stupně 3
Komunikace vozidla s okolím
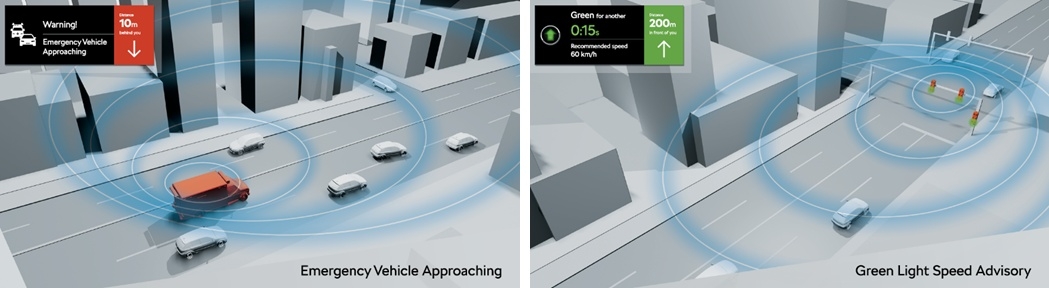
Komunikace vozidla s okolím umožňuje zefektivnit reakci systému na některé situace. Na obr. 5 jsou ukázány dva scénáře jako příklad. Na obr. 5a vozidlo záchranného systému informuje ostatní vozidla o své poloze, rychlosti a směru jízdy. To je příklad komunikace car-to-car (C2C). Ostatní autonomní vozidla tak mohou včas vytvořit uličku. Na obr. 5b je ukázána situace, kdy semafor informuje, za jak dlouho dojde k přepnutí ze zelené na červenou; to je příklad komunikace car-to-infrastructure (C2I). Vozidlo ze znalosti své polohy, rychlosti a polohy semaforu vyhodnotí, zda a kdy začít brzdit. V obou případech je reakce vozidla snazší a bezpečnější, než kdyby ji vyhodnocovaly senzory vozidla. Pro komunikaci na krátké vzdálenosti C2I se v současné době používá standard WLAN 802.11-p, pro komunikaci na větší vzdálenosti standard LTE-4G. V budoucnosti by oba systémy měl nahradit LTE-5G, nicméně v současnosti není ještě jasné, zda zpoždění přenosu dat vozidlo-backend-vozidlo/infrastruktura bude dostatečně krátké i pro komunikaci na krátké vzdálenosti.

Obr. 5. Příklady komunikace car-to-car (C2C) a car-to-infrastructure (C2I)
a) přiblížení vozidla záchranné služby, b) signalizace semaforu o čase do přepnutí světel
Pro bezpečnost provozu
Velkým tématem pro zavedení autonomních systémů je jejich testování a validace (schvalování). Současná legislativa EU (s výjimkou Německa) neumožňuje provoz systémů stupně 3 a vyššího. Není proto nikterak legislativně předepsáno, jakým způsobem se má prokázat, že dané systémy fungují a jsou dostatečně robustní a bezpečné pro nasazení na veřejných komunikacích. Příkladem může být ověření již zmíněné funkce Highway pilot (ve stupni 3 autonomního provozu). V Německu statistika nehodovosti na dálnici ukazuje, že střední doba nehody je asi 12 milionů kilometrů, jinými slovy, když řidič najede 12 milionů kilometrů, má téměř stoprocentní jistotu, že se stane účastníkem dopravní nehody. Předpokládejme, že uživatel chce, aby jeho autonomní systém byl dvojnásobně lepší. V takovém případě je nutno během validační kampaně najezdit a vyhodnotit asi 24 milionů kilometrů. A toto opakovat pro každou novou verzi systému. Z hlediska času a peněz však toto není možné. Proto se čím dál více uplatňují metody virtuálního testování SiL (Software-in-the-Loop) a HiL (Hardware-in-the-Loop). I tak ale jde o resimulaci řádu desítek PB (Peta Byte) dat, vyžadující patřičný výpočetní výkon a datová úložiště.
Popsané testování se nazývá statistické. K tomu se přidává testování deterministické, tedy vytvoření přesně definovaných testovacích scénářů. Tyto scénáře se obvykle testují na testovacím polygonu a vyžadují dosti nákladné technické vybavení. Aby bylo možné přesně dodržet vzájemné rychlosti a trajektorie pohybujících se objektů (vozidel a testovacích cílů) z důvodu opakovatelnosti testů za stejných podmínek, využívají se různé typy řídicích robotů a robotických platforem. Celý scénář je naprogramován do řídicího počítače a vzájemné polohy a rychlosti jednotlivých objektů jsou vyhodnocovány pomocí diferenciální GPS s přesností na centimetry. Ceny těchto zařízení se pohybují v řádu milionů dolarů.
Autonomní jízda v České republice
V České republice se, kromě Škoda Auto, zabývá vývojem a testováním pokročilých asistenčních systémů řidiče a autonomní jízdy několik dalších, převážně zahraničních společností. Na vývoji se spolupodílejí české univerzity a vědecká pracoviště. Testování probíhá na několika testovacích polygonech k tomuto účelu vystavěných nebo přebudovaných z bývalých sovětských vojenských letišť. Zároveň je zde snaha některých měst a regionů zřídit testovací oblasti v reálném provozu, což předpokládá legislativní pokrytí, vybudování patřičné infrastruktury a osazení daných oblastí telematickými systémy pro komunikaci C2I. Na Ministerstvu ČR dopravy působí pracovní skupina složená z odborníků z univerzitního prostředí, státních institucí i soukromých firem koordinující aktivity státu pro budoucí provoz autonomních vozidel. Zde jde především o přípravy právního rámce a mezinárodní standardizace, přípravy infrastruktury a technického zabezpečení, umožnění testování v reálném provozu, státní podpory výzkumných a vývojových aktivit a také o přípravy osvěty v dané problematice.
*) SAE International (SAE), dříve Society of Automotive Engineers, je profesní sdružení odborníků z oblasti leteckého, automobilového a dopravního průmyslu. Sdružení je standardizační organizací pro oblast motorových dopravních prostředků, včetně osobních a nákladních automobilů, lodí, vzdušných prostředků apod.
Vyšlo v časopise Elektro č. 6/2019 na straně 36.
Tištěná verze – objednejte si předplatné: pro ČR zde, pro SR zde.
Elektronická verze vyšlých časopisů zde.