



Transparentní umělé svaly umožňují robotům splynout s okolím
15. 7. 2020 | Tech Xplore | www.techxplore.com
Schopnost splynou s okolním prostředím je zcela neodmyslitelně obrovská evoluční výhoda, která umožňuje zvířatům vyhnout se predátorům a maskovat svůj pohyb. Roboti s podobnou schopností by nalezli uplatnění v mnoha situacích, od sledování podezřelých po výzkum zahrnující pozorování zvířat v jejich přirozeném prostředí.
Výzkumníci z National University of Singapore nyní vyrobili transparentní umělé svaly, které lze použít k sestrojení nové generace robota schopného kamufláže. Tento jedinečný koncept, představený poprvé při příležitosti konání mezinárodní konference IEEE International Conference on Robotics and Biomimetics (ROBIO) v loňském roce, je založen na umělých svalech s dielektrickými elastomery (DEA), třídě elektroaktivních polymerů používaných běžně při produkci měkkých robotů a flexibilních zařízení.
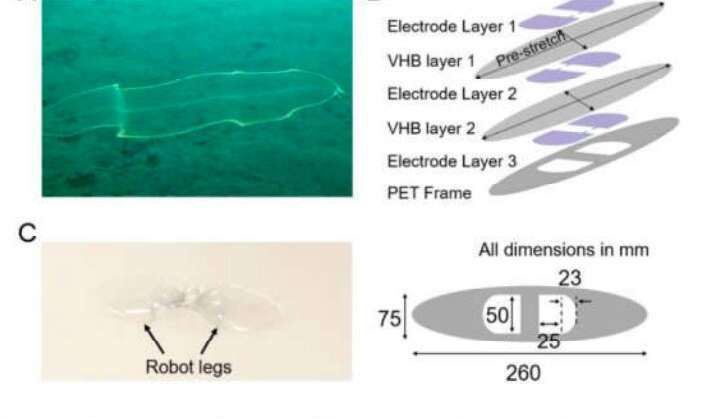
Navzdory svým výborným vlastnostem, mezi něž se řadí flexibilita a elektrická vodivost, však tradiční DEA nedokáží napodobit schopnost kamufláže svých zvířecích protějšků. Ve skutečnosti je většina těchto polymerů vyráběna z viskózních tmavých materiálů, např. z uhlíkového maziva, které jednoduše nelze zprůhlednit. Výzkumníci z National University of Singapore použili v rámci svého výzkumu umělé svaly s dielektrickými elastomery se směsí průzračnějších materiálů.
Celý článek na Tech Xplore
Image Credit: National University of Singapore
-jk-