



Švábi jako předloha pro robota, který se dokáže protáhnout úzkými štěrbinami
9. 2. 2016 | UC Berkeley | news.berkeley.edu
Šváb se dokáže zmenšit a vtěsnat se do škvíry o velikosti jedné desetiny palce (1 palec = 2,54 cm). Uvnitř se pak dokáže pohybovat velmi rychle i navzdory tomu, že jeho tělo je smáčknuto na poloviční velikost.
Výzkumníci z UC Berkeley zkoumali chování švábů a na základě zjištění vyvinuli robota, který se dokáže rychle protáhnout úzkými štěrbinami. Tato vlastnost by mohla být využita při záchraně lidí a zvířat z budov poškozených tornádem, při zemětřesení nebo explozích.
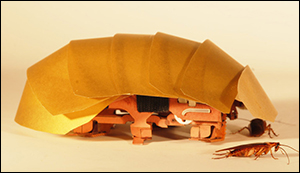
Vedoucí výzkumu Kaushik Jayaram vypozoroval, že švábi se při protahování úzkými štěrbinami dokáží vypořádat se silou přesahující 900 násobek jejich tělesné váhy. Jayaram se nechal inspirovat technikou švábů a vytvořil jednoduchého robota, který se vleze do dlaně. Vybavil ho plastovým štítem na hřbetu a schopností roztáhnout při stlačení nohy. Robot nazvaný CRAM byl schopen zmenšit svou velikost a protáhnout se škvírou poloviční velikosti.
Jayaram sestavil robota s použitím techniky podobné origami, která je dnes k dostání od společnosti Dash Robotics. Jayaram nyní pracuje na větší verzi robota, který by našel uplatnění v reálných situacích.
Celý článek na UC Berkeley
Image Credit: UC Berkeley
-jk-