



Robotický šváb nové generace
3. 7. 2018 | SEAS | www.seas.harvard.edu
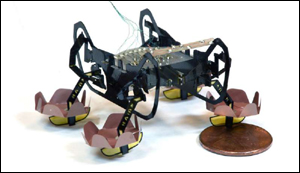
V přírodě dokáže šváb přežít pod vodou až 30 minut. Ještě lepších hodnot však dosahuje nový robotický šváb harvardských výzkumníků nazvaný HAMR, který umí chodit po zemi, klouzat na hladině a chodit pod vodou.
Výhodou této další generace robota HAMR jsou multifunkční klapky na jednotlivých nožičkách, které využívají povrchové napětí a indukovaný odpor, aby udržely robota na hladině. V případě potřeby se může robot kdykoli ponořit pod hladinu.
Pohyb na hladině vody umožňuje robotovi překonávat podvodní překážky a snížit aerodynamický odpor. Díky čtyřem asymetrickým klapkám a speciálnímu způsobu chůze dokáže HAMR doslova pádlovat na hladině vody. Pohyb robota by se dal přirovnat k pohybu brouka, což mu umožňuje efektivní pohyb dopředu a otáčení.
Celý článek na SEAS
Image Credit: Harvard University
-jk-