



Robot-provazochodec zlevní kontroly elektrického vedení
Na Kalifornské univerzitě v San Diegu vytvořili robot jménem SkySweeper, který je uzpůsobený k pohybou po drátech vysokého napětí. Robot zde bude 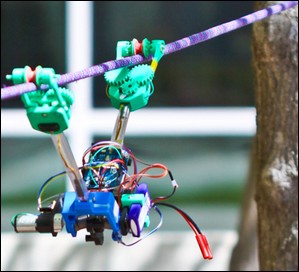 vyhledávat poškození a jiné závady vyžadující opravu. Robot byl sestaven z přebytečných součástek „z šuplíku“, jen plastové části byly vytištěny na levné 3D tiskárně – náklady na jeho vytvoření tak nepřesáhly 1000 dolarů, což jej činí daleko levnějším než dva roboty, které jsou používány ke kontrolám vedení v Kaliofrnii v současnosti.
vyhledávat poškození a jiné závady vyžadující opravu. Robot byl sestaven z přebytečných součástek „z šuplíku“, jen plastové části byly vytištěny na levné 3D tiskárně – náklady na jeho vytvoření tak nepřesáhly 1000 dolarů, což jej činí daleko levnějším než dva roboty, které jsou používány ke kontrolám vedení v Kaliofrnii v současnosti.
„Současné roboty pro kontrolu vedení jsou velké, složité a drahé. Provozovatelé vedení mohou ke kontrolám používat také řízené nebo automatické helikoptéry, vybavené infračerveným snímačem“ říká Nick Morozovsky, doktorand v oboru mechaniky. „Toto je však mnohem jednodušší“. Morozovsky robota navrhnul v Laboratoři koordinované robotiky, pod vedením profesora mechaniky a letectví Toma Bewleyho.
Robota lze dále dovybavit indukčními cívkami, které by odebíraly energii ze samotného vedení, což by znamenalo, že robot by mohl být nasazen několik týdnů nebo měsíců v kuse. SkySweeper je tvořen dvěma rameny ve tvaru V s kloubem poháněným motorem v jejich středu, a jeho konce jsou vybaveny svorkami, které otevírají nebo zavírají, podle toho, jak je to potřeba při pohybu po vedení. Robot tím, že uvolní svorku na jedné straně a utáhne jí na druhé, vytvoří opěrný bod, který mu umožní přisunout druhé rameno s povolenou svorkou.
Více na: mae.ucsd.edu