



Origami robot se dokáže sám složit, předvádí originální kousky a je zcela rozložitelný
5. 6. 2015 | IEEE Spectrum | spectrum.ieee.org
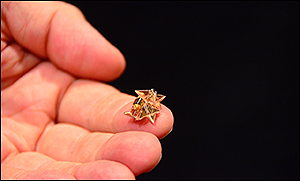
Výzkumnící MIT představili na konferenci ICRA 2015 v Seattlu miniaturního origami robota, který se dokáže sám složit, umí chodit, plavat a v případě potřeby je kompletně rozložitelný.
Je to vůbec poprvé, kdy byl robot schopen demonstrovat tento cyklus a časem toho bude schopen i v lidském těle. Robot, vyrobený z magnetu a PVC vrstveného mezi laserem seříznuté strukturální vrstvy (polystyren nebo papír), váží 0,31 g a měří 1,7 cm. Robot se po zahřátí rozloží za necelou minutu a může se pohybovat rychlostí 3-4 m/s.
„Motor“ robota je složen ze 2 částí: z neodymového magnetu, kolem kterého se robot poskládá a poté se vydá na cestu a ze čtyř magnetických cívek pod povrchem, které vytváří magnetické pole potřebné k pohybu. Magnetické pole se zapíná a vypíná na frekvenci 15 Hz. To způsobí, že magnet, se kterým je robot spojen, kmitá tam a zpět a robot kopíruje jeho pohyb. Při tomto pohybu se přední a zadní nohy robota střídavě dotýkají země a asymetrie designu - v kombinaci se záměrně vystředěnou rovnováhou - způsobuje pohyb robota. Nic z toho nefunguje, dokud se robot nerozloží.
Výhodou použití robota namísto prostého magnetu je schopnost plavat, stejně jako efektivnější vykonávání úkonů, jako je pohyb s předměty nebo kopání. Chcete-li zapůsobit, můžete proces skládání rozložit na více úrovní. Stačí robota mírně zahřát a ten se poskládá do určitého tvaru. Zvýšení teploty aktivuje druhý stupeň a robot opět změní tvar. Po dosloužení se robot jednoduše rozloží v nádobě s acetonem. Vše co po něm zbude, je magnet. Strukturální vrstvu robota je možné vyrobit z materiálu rozložitelného ve vodě. Vědci již pracují na integraci senzorů přímo do robota, podle kterých stroj vyhodnotí, kdy může konat nezávisle. A bude toho schopen i v lidském těle.
Celý článek na IEEE Spectrum
Image credit: Evan Ackerman, IEEE Spectrum
-jk-