



Nové oči pro roboty - Fraunhofer IPMS na Photonics West 2014 představí nový kamerový systém
Pět výzkumných institucí a dvě firmy pracovaly v rámci evropského výzkumném projektu TACO po tři a půl roku na vývoji nového typu 3D kamerového systému.
 Fraunhoferův institut pro fotonické mikrosystémy (Fraunhofer IPMS) v Drážďanech dodal jako klíčovou hardwarovou součást systému novou skenovací technologii MEMS, Ta umožní detekci „relevantních“ objektů v okolí robotu v rozlišení podobném vidění člověka, aniž by docházelo ke zbytečným nárůstům objemu dat. Na výstavě Photonics West 2014 v San Franciscu bude 4. až 6. února 2014, Fraunhofer IPMS předvádět kompletní kamerový systém poprvé jako plně funkční prototyp široké odborné veřejnosti.
Fraunhoferův institut pro fotonické mikrosystémy (Fraunhofer IPMS) v Drážďanech dodal jako klíčovou hardwarovou součást systému novou skenovací technologii MEMS, Ta umožní detekci „relevantních“ objektů v okolí robotu v rozlišení podobném vidění člověka, aniž by docházelo ke zbytečným nárůstům objemu dat. Na výstavě Photonics West 2014 v San Franciscu bude 4. až 6. února 2014, Fraunhofer IPMS předvádět kompletní kamerový systém poprvé jako plně funkční prototyp široké odborné veřejnosti.
Rozlišení barev a odstínů, odhad vzdálenosti, identifikace předmětů a pohybu v okolí ve 3D a v řádu sekund. Věci, které jsou snadné pro člověka, jsou pro stroj obtížné. Robotům chybí prostorové informace získávané v reálném čase i trojrozměrné vidění a nebo, pokud jimi disponují, musejí zaznamenávat příliš mnoho informací, než aby je mohly vyhodnocovat v dostatečně krátkém čase a promítat do svých akcí.
Vědci z Fraunhofer IPMS v Drážďanech vyvinuli extrémně kompaktní skenovací technologii LinScan, která umožňuje snímat trojrozměrný obraz a má nastavitelný objemem skenovaných dat a tedy i rozlišení. 3D kamerové systémy vybavené systémem LinScan mohou budoucím generacím robotů umožnit nejdříve zběžně prozkoumat jejich vizuální pole a identifikovat v něm předměty, které hledají, a následně se zaměřit jen na ně.
Podmínkou pro uplatnění tohoto principu tzv. foveace (foveation) však je, aby robot věděl, co hledá. Být schopen identifikovat a interpretovat okolí už pak je otázkou vteřin. Kromě hardwaru (oko) je zapotřebí také odpovídajících softwarových algoritmů pro analýzu viděného (mozek). Robot musí být vybaven senzory obrazu a softwarem pro trojrozměrné vidění, aby získal prostorovou představu o svém okolí a byl pak schopen určit vzdálenosti předmětů a pohybovat se mezi nimi.
Aby bylo možné splnit všechny tyto požadavky, pracoval Fraunhofer IPMS v rámci evropského výzkumného projektu TACO - Three Dimensional Adaptive Camera with Object Detection and Foveation společně se čtyřmi dalšími výzkumnými institucemi a dvěma firmami na vývoji tohoto nového druhu adaptivní kamery.
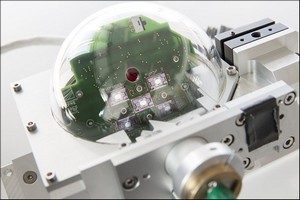
Srdcem systému je optický scanner s pěti synchonně fungujícími LinScan zrcadly z Fraunhofer IPMS. MEMS scanner zaručuje dostatečnou clonu systému objektivů s efektivním ohniskem 5mm a byl navržen pro adaptivní 3D-kamerový systém s rozsahem snímání minimálně 40° x 60°, 1 MVoxel je měřen s 3 mm odchylkou na 7,5 m. Ovladač umožňuje nastavit obnovovací frekvenci od 1 do 100 Hz s tím, že hloubku scanu v oblasti relevance může lze lokálně zvýšit.
TACO projekt byl nedávno uzavřen jako úspěšný.
Více na stránkách Fraunhofer IPMS
Foto: Fraunhofer IPMS