



Malí roboti tvoří překvapivě komplexní útvary
3. 8. 2015 | Harvard University | www.eecs.harvard.edu
Je známo, že organismy v přírodě umí velmi dobře spolupracovat a tvořit překvapivě složité útvary - od jednobuněčných organismů až po složité stavby, jaké vytvářejí z hlíny termiti.
Výzkumníci na poli robotiky se inspirovali touto kolektivní inteligencí a vytvořili umělé systémy, které napodobují chování jedinců utvářejících velké celky. Výsledkem jsou roboti o velikosti mince, jejichž předlohou bylo chování mravenců, včel či buněk. Tyto organismy spolupracují jako jednotlivci, ale společně dokáží vytvořit obrovské spolky.
Od koncepčního návrhu na papíře, či v dnešní moderní době spíše v počítači, k realiě v podobě skutečných robotů, je dlouhá cesta. Při stavbě systémů, které by měly schopnost tvořit složité formace, vyvstává otázka, jak roboty koncipovat nejen z hlediska programovacího jazyka ale i vlastního designu. Už jen naprogramování algoritmu, který by byl shcopen kontrolovat stovky či tisíce robotů je velkou výzvou. Z důvodů finanční a časové náročnosti a s ohledem na složitost úkolu, tak prozatím roboti operují v režimu simulace či ve skupinkách do 10 robotů.
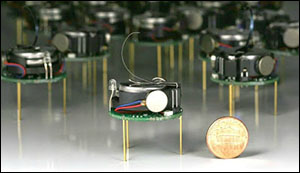
Kiloboti, jak jsou tito malincí roboti trefně nazývání, se skládají z 1024 prvků a jsou navrženi tak, aby je zvládl ovládat jeden člověk a mohl tak sám experimentovat s kolektivním chováním velkého počtu samosprávných systémů. Každý robot disponuje základní způsobilostí potřebnou ke správnému fungování (programovatelné nastavení, základní pohyby a komunikační zařízení), ale je vyroben z levných součástek a z velké části je vyroben automatizovaným procesem. K tomu všemu je systém navržen tak, aby jej mohl ovládat jeden člověk. Ovládat nejen jednoho robota, ale kompletní sestavu. Napomoci tomu má jednoduché programování, možnost zapnutí a vypnutí a nabíjení všech robotů. Cílem výzkumníků je zpřístupnit experimentální výzkum kolektivního chování a rozšířit jej pro potřeby hlubšího poznání chování jednotlivců ve skupině a vytvořit algoritmy potřebné pro správné fungování těchto skupin.
Celý článek na stránkách Harvard University
Image Credit: Harvard University
-jk-