



Dvounohý robot z Tokia dovede běhat rychlostí až 4,2 km/h
Výzkumný tým z tokijské univerzity představil jednoho z nejrychlejších dvounohých robotů na světě. Robot dosahuje rychlosti až 4,2 km za hodinu.
 Zatímco většina robotů je ovládáno s využitím tzv. bodu nulového momentu pohybu. Nový robot používá pro vyrovnání dynamiky kombinaci vysokorychlostní kamery a stabilizačního motoru a může se tak naklánět dopředu, aniž by ztratil stabilitu. Díky tomu může pohodlně běhat a dokonce umí předvést i salto.
Zatímco většina robotů je ovládáno s využitím tzv. bodu nulového momentu pohybu. Nový robot používá pro vyrovnání dynamiky kombinaci vysokorychlostní kamery a stabilizačního motoru a může se tak naklánět dopředu, aniž by ztratil stabilitu. Díky tomu může pohodlně běhat a dokonce umí předvést i salto.
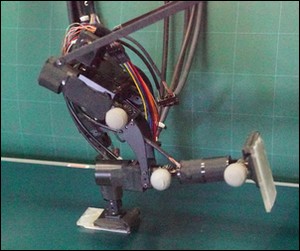
Délka nohy tohoto robotu pjmenovaného Achires (Actively Coordinated High-speed Image-processing Running Experiment System) je asi 14 cm a je schopna provést přibližně šest kroků za jedinou vteřinu. I když zatím dovede nepřetržitě běžet asi jen 10 sekund, tým usilovně pracuje na prodloužení tohoto času.
Prof. Ishikawa je ve světě robotiky známé jméno: jeho výzkumná skupina vytvořila již robot jménem Janken, který využívá kameru pro rychlou detekci pohybu lidských rukou a dovede kohokoliv porazit ve hře kámen-nůžky-papír.
Profesor vysvětlil, že oba roboty pracují na stejném principu, a upozorňuje, že zlepšení hardware a systému rozpoznávání prostřednictvím kamery může jednou vést ke vzniku superrychlých robotů pro výrobní linky, nebo jiných technologií, které snadno překonají rychlost, které je schopen dosáhnout člověk.
Více na Wall Street Journal Japan nebo na stránnce Laboratoře profesora Ishikawy.