Čtyřnohý robot umí běhat jako kočka
Laboratoř biorobotiky na École Polytechnique Fédérale de Laussane představila na začátku 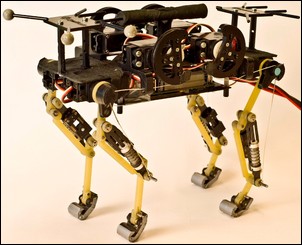 června čtyřnohého robota velikosti kočky. Robot váží asi 1kg a je asi 21 cm dlouhý, na svých čtyřech nohách dokáže běžet rychlostí až 1,42 m/s, to znamená že za vteřinu urazí až 7 délek svého těla. Tím je Cheetah-cub jak byl robot nazván, nejrychleji se pohybujícím čtyřnohým robotem pod 30 kg váhy.
června čtyřnohého robota velikosti kočky. Robot váží asi 1kg a je asi 21 cm dlouhý, na svých čtyřech nohách dokáže běžet rychlostí až 1,42 m/s, to znamená že za vteřinu urazí až 7 délek svého těla. Tím je Cheetah-cub jak byl robot nazván, nejrychleji se pohybujícím čtyřnohým robotem pod 30 kg váhy.
Tento robot má několik velice zajímavých vlastností, zejména v porovnání s jeho většími, pomalejšími a méně pohyblivými čtyřnohými kolegy.
- je nejrychlejším známým čtyřnohým robotem pod 30 kg,
- dokáže sám sebe stabilizovat i ve vysokých rychlostech je schopen bránit svému převrácení,
- je lehký a kompaktní,
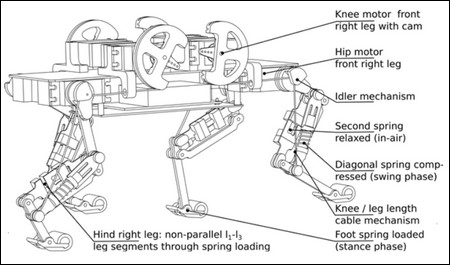
- jeho výroba byla levná, je snadno vyrobitelný a jeho použití je bezpečné, což jej činí vhodným pro výzkum vícečlánkových nohou u čtyřnohých robotů.
Podrobnosti včetně technických specifikací naleznetze ZDE
Obrázky a video: Biorobotics Laboratory, EPFL.