| Posouzení konstrukce reluktančního stroje analýzou magnetického pole doc. Ing. František Veselka, CSc.,
ústav výkonové elektrotechniky a elektroniky FEKT VUT v Brně Reluctance machine belongs among perspective machines and this is a reason why not only construction but also the ways of analysis of its qualities are followed. In this contribution the results of the work devoted to the usage of the finite element method for the study of qualities of its magnetic circuit and optimization of our construction are presented. Classical construction of reluctance machine and the latest construction – ALA rotor are compared. Torque M was taken to be the comparative criterion. 1. Úvod Stále větší zastoupení robotizace a automatizace v průmyslu vyžaduje optimální poháněcí zařízení. Ke splnění kladených požadavků (práce při různých otáčkách, různém zatížení, provozních režimech, minimální moment setrvačnosti apod.) je třeba vybrat vhodný stroj, popř. zvolit jeho konstrukční provedení. V mnoha aplikacích může tyto požadavky splnit reluktanční motor*) s vhodným měničem frekvence.  Obr. 1. Znázornění geometrie rotoru jednotlivých variant reluktančních strojů SYN-1, SYN-2, ALA-1, ALA-2 Obr. 1. Znázornění geometrie rotoru jednotlivých variant reluktančních strojů SYN-1, SYN-2, ALA-1, ALA-2
Obr. 2. Průběhy pro variantu ALA-1 při natočení rotoru o 0°; a) – průběh indukčních čar, b) – průběh magnetické indukce B Návrh reluktančního motoru není snadný. Často se vychází z výsledků experimentálních zkoušek. V současné době lze vývoj urychlit použitím výpočetní techniky s moderními výpočetními programy, které umožňují nejen modelování stroje, ale i simulování různých provozních stavů. Tak je možné studovat vlastnosti stroje i bez jeho vyrobení. Praxe ukazuje, že takto dosažené výsledky jsou srovnatelné s výsledky získanými klasickým měřením. S ohledem na technologickou náročnost výroby reluktančních motorů byl studován vliv jejich konstrukčního provedení na velikost momentu. 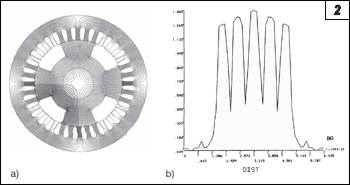 2. Postup při modelování analyzovaných strojů Pro daný technický problém byla zvolena magnetostacionární dvoudimenzionální vektorová analýza s využitím prvku č. 13. Hodnoty veličin na hranicích určovaly Dirichletovy podmínky a změny veličiny podél normály stanovovaly Neumanovy podmínky. Při tvorbě modelů byla využita dostupná technická dokumentace těchto strojů. Modely byly vytvořeny za těchto zjednodušujících podmínek: - všechna vinutí byla nahrazena obsahy,
- materiálem prvků obsahů byl vzduch,
- proud ve vodičích byl nahrazen konstantní proudovou hustotou na všech prvcích vinutí,
- bylo zanedbáno zaoblení vodicích zářezů na vnějším obvodu statoru.
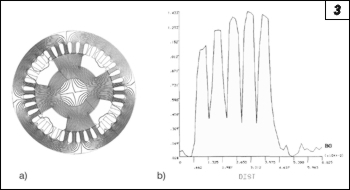 Obr. 3. Průběhy pro variantu ALA-1 při natočení rotoru o 10°; a – průběh indukčních čar, b – průběh magnetické indukce B Obr. 3. Průběhy pro variantu ALA-1 při natočení rotoru o 10°; a – průběh indukčních čar, b – průběh magnetické indukce B
Obr. 4. Průběhy pro variantu ALA-1 při natočení rotoru o 20°; a – průběh indukčních čar, b – průběh magnetické indukce B Model se skládal z klíčových bodů, úseček a ploch. Na základě těchto údajů vygeneroval program ANSYS síť uzlů a prvků pro jednotlivá provedení reluktančních strojů (obr. 1). Liniím na hranicích ploch bylo přiřazeno vhodné rozdělení, a tím určen počet uzlů na linii a počet prvků na ploše. Zvláštní pozornost byla věnována modelování vzduchové mezery. Na vygenerované síti byla patrná symetrie magnetického obvodu. K výpočtu byla použita ostrá verze programu ANSYS s neomezenou šířkou fronty na počítači Hewlett Packard řady 9000, model 735 s procesorem PARISC, pracujícím s operačním systémem HP- UX90. 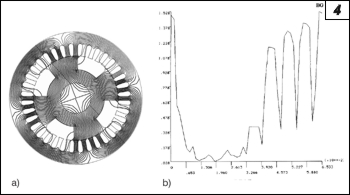 3. Výsledky analýzy Pro jednotlivé varianty byl nejprve počítán průběh indukčních čar a průběhy magnetické indukce na vybraných místech magnetického obvodu stroje. Z těchto zvolených průběhů byl nejaktuálnější průběh magnetické indukce ve vzduchové mezeře (obr. 2 až obr. 4). Z jednotlivých obrázků je patrné rozložení magnetického pole při natáčení rotoru. Pulsace průběhu magnetické indukce jsou způsobeny drážkováním statoru a speciální konstrukcí rotoru. 4. Určování momentu stroje Pro jednotlivá konstrukční řešení rotoru reluktančního stroje a natočení rotoru byla dále zjišťována velikost momentu podle vztahu (4.1). 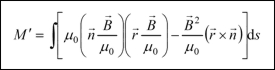
kde M' jsou hodnoty momentů reluktančního stroje, m0 permeabilita vakua, B magnetická indukce. Hodnoty momentů M' představují vypočítané hodnoty momentů v programu ANSYS a udávané v N·m·m–1. Hodnoty momentu M představují momenty již přepočítané na použitý stroj s délkou statorového svazku l = 98 mm (obr. 5). 5. Závěr Je zřejmé, že zjištěné průběhy jsou přibližně sinusové povahy s lokálním maximem při úhlu natočení 20 až 25°. Velikost momentu rovněž dokumentuje progresivnost jednotlivých konstrukčních řešení. 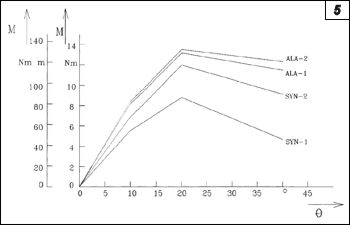 Obr. 5. Znázornění průběhu momentů v závislosti na natočení rotoru pro jednotlivá konstrukční provedení rotoru a původní stator Obr. 5. Znázornění průběhu momentů v závislosti na natočení rotoru pro jednotlivá konstrukční provedení rotoru a původní stator Konstrukce rotoru SYN-2 je vzhledem k provedení SYN-1 (100) lepší o 23,8 %. Konstrukce ALA-1 je lepší o 47,2 % v porovnání s provedením SYN-1 a o 19,0 % lepší v porovnání s SYN-2. Provedení ALA-2 je oproti SYN-1 lepší o 51,5 % a vzhledem k provedení rotoru ALA-1 představuje zlepšení o 3,0 %. Lze tedy říci, že analýza průběhu magnetického pole s využitím programu ANSYS je účinným nástrojem i pro optimalizaci konstrukce reluktančních strojů a zajišťování požadovaných provozních vlastností. Literatura:
[1] LIPO, T. A.: Koncepce nového reluktančního stroje pro pohony s proměnnou rychlostí.
[2] STOLAŘÍK, M. – VESELKA, F.: Přehledová studie reluktančních motorů. Učební text FEI VUT v Brně. Brno, 1995.
[3] KOLÁŘ, V.: Analýza průběhu magnetického pole reluktančního motoru s využitím programu ANSYS. DP ÚESP FEI VUT v Brně. Brno, 1996.
[4] Šesté středomořské elektrotechnické zasedání, Slovinsko, květen 1991, Vol. l, pp. 34–42. |  Doc. Ing. František Veselka, CSc., absolvoval Vysoké učení technické v Brně v roce 1978. Titul kandidát věd získal v roce 1984 a titul docent roku 1991. Na FEKT je od roku 1978. V průběhu svého působení v ústavu elektrických strojů a přístrojů se věnoval problematice aplikace permanentních magnetů v elektrických strojích a zařízeních, výpočtům systémů s permanentními magnety a speciálním elektrickým strojům. V současné době se zaměřuje na zlepšování provozních vlastností elektrických strojů s kluzným kontaktem, na měření velmi malých vzdáleností, studium a modelování dynamických jevů u elektromechanických soustav, problematiku inovací s využitím TRIZ. Průběžně spolupracuje s průmyslovou praxí. | |
*) Reluktanční motor má klecový rotor, jehož počet vybrání ve svazku rotorových plechů je shodný s počtem pólů statoru. Magnetický tok statoru se uzavírá přes rotor, především přes části oddělené malou vzduchovou mezerou, nikoliv přes vybrání, která vlivem velké vzduchové mezery představují značný magnetický odpor. Rotor tak získává vlastní póly, a tím se brání skluzu za otáčkami točivého pole statoru. Reluktanční motor se rozbíhá jako motor s kotvou nakrátko a po rozběhu pracuje jako synchronní motor se synchronními otáčkami. Jeho přetížení však vede k asynchronnímu běhu se skluzem. V místech s vybráním dochází působením velké vzduchové mezery ke značnému rozptylu magnetického toku. Proto mají reluktanční motory obecně menší účiník a větší odběr proudu (z důvodu menšího indukčního odporu) než asynchronní motory. Používají se k pohonu strojů s konstantními otáčkami (pozn. red.). | 

